пњљ@Cloud Programming World Cupпњљ@пњљпњљ1пњљпњљ пњљwпњљпњљпњљNпњљпњљпњљEпњљhпњљvпњљпњљпњљOпњљпњљпњљ~пњљпњљпњљOпњљпњљпњљ[пњљпњљпњљhпњљJпњљbпњљv
пњљ@пњљпњљ№НпњљiпњљEпњљRпњљпњљпњљпњљпњљпњљпњљ@пњљi'13.11.25пњљj
|
 |
The 1st Cloud Programming World Cup
пњљпњљ1пњљпњљ пњљwпњљпњљпњљNпњљпњљпњљEпњљhпњљvпњљпњљпњљOпњљпњљпњљ~пњљпњљпњљOпњљпњљпњљ[пњљпњљпњљhпњљJпњљbпњљv
пњљ`пњљJпњљпњљпњљLпњљbпњљgпњљiSDKпњљjпњљ…ВпњљпњљNпњљпњљпњљEпњљhпњљAпњљvпњљпњљпњљћГvпњљпњљпњљOпњљпњљпњљ~пњљпњљпњљOпњљZпњљpпњљпњљпњљпњљпњљпњљпњљIпњљ`
|
Cloud Programming World Cupпњљ@пњљпњљ1пњљпњљ пњљwпњљпњљпњљNпњљпњљпњљEпњљhпњљvпњљпњљпњљOпњљпњљпњљ~пњљпњљпњљOпњљпњљпњљ[пњљпњљпњљhпњљJпњљbпњљvпњљiпњљпњљ√БFCPWCпњљпњљпњљsпњљѕИпњљпњљпњљjпњљћГGпњљпњљпњљgпњљпњљпњљ[пњљпњљпњљпњљпњљпњљ8пњљ`пњљ[пњљпњљпњљiпњљпњљпњљ{5пњљAпњљCпњљO3пњљjпњљ∆В»ВпњљAпњљ≈ПIпњљпњљпњљпњљпњљ6пњљ`пњљ[пњљпњљпњљiпњљпњљпњљ{4пњљAпњљCпњљO2пњљjпњљпњљпњљ„ВƒВпњљпњљmпњљ~пњљlпњљ[пњљgпњљB2013пњљN11пњљпњљ21пњљпњљпњљAпњљЏНпњљпњљлПЦпњљпњљпњљ…ЙпњљпњљпњљпњљƒБAпњљ≈ПIпњљпњљпњљJпњљRпњљпњљпњљпњљпњљoпњљƒГпњљпњљ[пњљпњљпњљhпњљJпњљbпњљvпњљ№Лyпњљпњљ3пњљ¬ВћРRпњљпњљпњљпњљпњљпњљпњљ П№ВпњљпњљпњљпњљиВҐпњљпњљпњљпњљпњљ№ВпњљпњљпњљпњљB
пњљпњљпњљ[пњљпњљпњљhпњљJпњљbпњљvпњљ№Бiпњљ≈ЧDпњљGпњљ№Бjпњљ@пњљ№Лпњљ30пњљпњљпњљ~пњљI
| пњљпњљпњљ@пњљпњљпњљ[пњљпњљпњљhпњљJпњљbпњљvпњљ№Бiпњљ≈ЧDпњљGпњљ№БjпњљF2пњљпњљi |
|
пњљ№Лпњљ30пњљпњљпњљ~пњљAпњљпњљпњљ[пњљпњљпњљhпњљJпњљbпњљvпњљAпњљ№Ппњљ |
| пњљпњљпњљ@пњљRпњљпњљпњљпњљпњљпњљпњљ П№Кeпњљ№БF5пњљпњљi |
|
пњљ№Лпњљ5пњљпњљпњљ~пњљAпњљRпњљпњљпњљпњљпњљпњљпњљ П№ГJпњљbпњљvпњљAпњљ№Ппњљ |
| пњљпњљпњљ@пњљmпњљ~пњљlпњљ[пњљgпњљпњљiпњљF7пњљпњљi |
|
пњљ№ПпњљAпњљпњљiпњљpпњљlпњљпњљпњљAFORUM8пњљIпњљпњљпњљWпњљiпњљпњљпњљiпњљi |
| пњљпњљпњљ@пњљпњљiпњљпњљпњљпњљ№БiParticipation Prizeпњљj |
|
пњљKпњљпњљћВ∆ВпњљпњљиЙЮпњљеВ≥пњљкВљпњљпњљпњљ„ВƒВћНпњљiпњљ…СќВпњљпњљAпњљпњљiпњљпњљпњљпњљ№П№ПуВ™Спњљпњљпњљпњљ№ВпњљпњљB
пњљiпњљпњљпњљпњљпњљпњљeпњљ…ХsпњљпњљпњљпњљKпњљпњљпњљ…УKпњљпњљпњљпњљпњљ»ВпњљпњљпњљпњљћВпњљпњљпњљпњљпњљкНЗпњљЌБAпњљќПџКOпњљ∆В»Впњљ№Впњљпњљj |
|
  |
пњљ{пњљпњљпњљиПЗ |
|
|
| пњљ@пњљпњљ№Мпњљпњљпњљпњљ@пњљi'13.11.21пњљj |
пњљ≈ПIпњљпњљпњљJпњљRпњљпњљ |
пњљ\пњљпњљпњљпњљ |
|
| |
|
 |
пњљ@ |
|
пњљпњљпњљ[пњљпњљпњљhпњљJпњљbпњљvпњљпњљ |
|
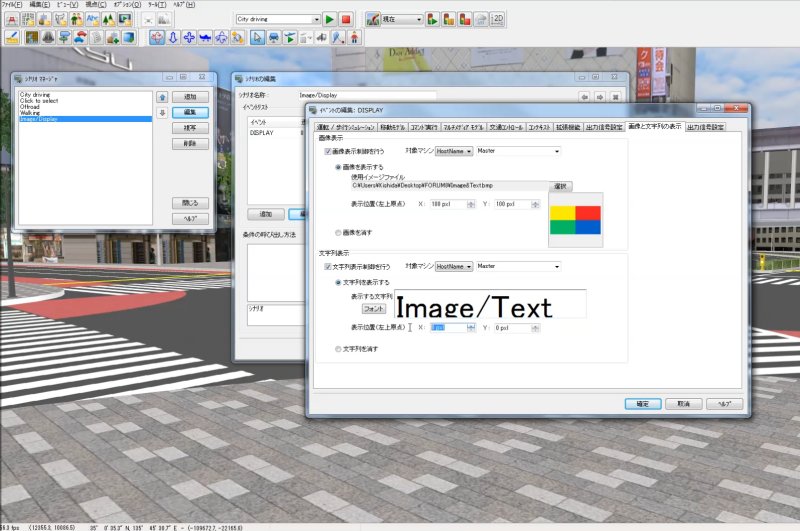
пњљ@пњљпњљiпњљ^пњљCпњљgпњљпњљпњљFпњљ@Image View Event Plugin/ Image View Slave Plugin,
пњљ@пњљ@пњљ@пњљ@пњљ@пњљ@пњљ@ Contec Scenario Event Plugin
пњљ@пњљ`пњљ[пњљпњљпњљпњљпњљ@пњљ@пњљFпњљ@пњљпњљпњљsпњљпњљwпњљ@KU-ITS |
|
|
|
UC-win/RoadпњљпњљNIRSпњљпњљAпњљgпњљпњљпњљAпњљNпњљпњљпњљXпњљ^пњљ[пњљNпњљпњљпњљCпњљAпњљпњљпњљgпњљ≈ГCпњљпњљпњљ[пњљWпњљ∆ГeпњљLпњљXпњљgпњљпњљпњљ\пњљпњљпњљ≈ВпњљпњљпњљvпњљпњљпњљOпњљCпњљпњљпњљпњљпњљJпњљпњљпњљпњљпњљ№ВпњљпњљпњљпњљB
Plugin that UC-win/Road able to cooperate withNIRS and display image and
text on cluster client.
 |
PDFпњљ|пњљXпњљ^пњљ[(532KB) |
|
|
PPT(831KB) |
|
пњљTпњљпњљпњљvпњљпњљпњљжСЬ |
 |
 |
 |
|
|
 |
|
пњљRпњљпњљпњљпњљпњљпњљпњљ Ппњљпњљ@пњљ@пњљ]пњљпњљпњљпњљ
пњљHпњљq пњљOпњљV пњљпњљ
пњљiпњљOпњљпњљпњљпњљпњљfпњљпњљпњљwпњљпњљ пњљпњљ\пњљпњљпњљпњљ
пњљfпњљWпњљ^пњљпњљпњљnпњљпњљпњљEпњљbпњљhпњљпњљwпњљпњљwпњљ@ пњљпњљпњљCпњљпњљпњљпњљпњљj |
|
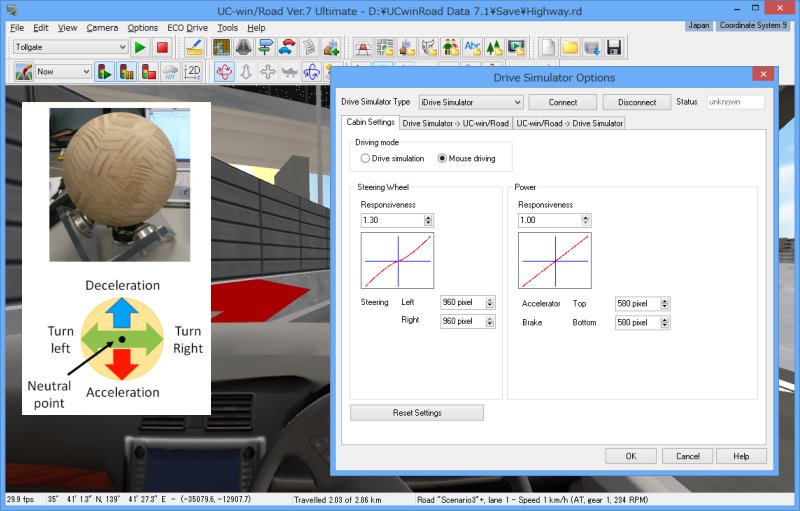
пњљ@пњљпњљiпњљ^пњљCпњљgпњљпњљпњљFпњљ@Mouse Driving Plugin
пњљ@пњљ`пњљ[пњљпњљпњљпњљпњљ@пњљ@пњљFпњљ@пњљ@пњљпњљBпњљпњљwпњљ@SDL |
|
|
|
пњљgпњљпњљпњљbпњљNпњљ{пњљ[пњљпњљпњљпњљпњљgпњљpпњљпњљпњљпњљпњљAпњљпњљпњљпњљпњљ‘ВћРVпњљпњљпњљпњљпњљXпњљeпњљAпњљпњљпњљпњљпњљOпњљVпњљXпњљeпњљпњљпњљпњљпњљƒВпњљпњљ№ВпњљпњљBпњљXпњљeпњљAпњљпњљпњљпњљпњљOпњљVпњљXпњљeпњљпњљпњљпњљ]пњљпњљпњљпњљпњљйВљпњљяВ…БAпњљhпњљпњљпњљCпњљrпњљпњљпњљOпњљVпњљ~пњљпњљпњљпњљпњљ[пњљ^пњљпњљпњљgпњљpпњљпњљпњљпњљпњљпњљпњљпњљпњљпњљпњљsпњљпњљпњљKпњљvпњљпњљпњљпњљпњљпњљ№ВпњљпњљпњљпњљAпњљ}пњљEпњљXпњљпњљпњљgпњљpпњљпњљпњљƒВпњљпњљпњљпњљпњљпњљпњљzпњљпњљ‘В≈НsпњљпњљпњљvпњљпњљпњљOпњљCпњљпњљпњљпњљпњљJпњљпњљпњљпњљпњљ№ВпњљпњљпњљпњљB
We propose a new steering system for an automobile using a track ball.
To evaluate the steering system, we need to conduct the experiment using
a driving simulator. We can do the experiment by using this plugin which
enable to drive a virtual vehicle using coordinates of a mouse.
|
PDFпњљ|пњљXпњљ^пњљ[(373KB) |
|
|
PPT(437KB) |
|
пњљTпњљпњљпњљvпњљпњљпњљжСЬ |
 |
 |
 |
|
|
 |
|
пњљRпњљпњљпњљпњљпњљпњљпњљ Ппњљпњљ@пњљ@пњљGпњљ}пњљ[пњљWпњљпњљпњљOпњљEпњљ^пњљпњљпњљпњљпњљgпњљпњљ
пњљиМі пњљпњљпњљY пњљпњљ
пњљiпњљjпњљпњљпњљ[пњљWпњљпњљпњљ[пњљWпњљ[пњљHпњљ»Спњљw пњљпњљпњљzпњљfпњљUпњљCпњљпњљпњљwпњљпњљпњљyпњљпњљпњљпњљпњљj |
|
пњљ@пњљпњљiпњљ^пњљCпњљgпњљпњљпњљFпњљ@Show the track of a vehicle
пњљ@пњљ`пњљ[пњљпњљпњљпњљпњљ@пњљ@пњљFпњљ@пњљпњљCпњљпњљ Спњљwпњљ@Kungfu baozi |
|
|
|
пњљhпњљпњљпњљCпњљrпњљпњљпњљOпњљпњљпњљ[пњљhпњљћНџВ…БAпњљushow trackпњљvпњљ{пњљ^пњљпњљпњљпњљпњљNпњљпњљпњљbпњљNпњљпњљпњљпњљ∆БAпњљ}пњљbпњљvпњљ≈Й^пњљ]пњљпњљпњљйУєпњљЎВпњљпњљ\пњљпњљпњљпњљпњљпњљ№ВпњљпњљBпњљЌИЌВћКOпњљ…В≈Пoпњљпњљ∆УпњљпњљЎВЌХ\пњљпњљпњљпњљпњљпњљ№ВпњљпњљпњљB
When you are in the driving mode. And you clickпњљ@the show track button.
The map will show theпњљ@track you drive. But if it's out of range, you can
notпњљ@see your vehicle's track.
|
PDFпњљ|пњљXпњљ^пњљ[(436KB) |
|
|
PPT(8,983KB) |
|
пњљTпњљпњљпњљvпњљпњљпњљжСЬ |
 |
 |
 |
|
|
 |
|
пњљRпњљпњљпњљпњљпњљпњљпњљ П№Б@3DпњљVпњљ~пњљпњљпњљпњљпњљ[пњљVпњљпњљпњљпњљпњљпњљ
Pencreach Yoann пњљпњљ
пњљiпњљtпњљHпњљ[пњљпњљпњљпњљпњљGпњљCпњљgпњљ@VRпњљJпњљпњљпњљ}пњљlпњљ[пњљWпњљпњљпњљj |
|
пњљ@пњљпњљiпњљ^пњљCпњљgпњљпњљпњљFпњљ@Evacuation Data Import and Display
пњљ@пњљ`пњљ[пњљпњљпњљпњљпњљ@пњљ@пњљFпњљ@пњљпњљCпњљпњљwпњљ@Cloud1205 |
|
|
|
UC-win/Road 8.1.2пњљ@пњљћФпњљпњљпњљЌГvпњљпњљпњљOпњљCпњљпњљпњљAпњљyпњљпњљUC-win/Road SDK 8.1.2пњљпњљпњљgпњљpпњљпњљпњљƒВпњљпњљ№ВпњљпњљBпњљfпњљпњљпњљпњљUC-win/Roadпњљ≈ВћГVпњљ~пњљпњљпњљпњљпњљ[пњљVпњљпњљпњљпњљпњљпњљпњљsпњљпњљпњљƒВпњљпњљ№ВпњљпњљBпњљVпњљ~пњљпњљпњљпњљпњљ[пњљVпњљпњљпњљпњљпњљEпњљVпњљiпњљпњљпњљIпњљћТпњљпњљ≈ОgпњљpпњљпњљпњљпњљйХФпњљпњљпњљЌБAпњљпњљпњљпњљ30mпњљAпњљпњљ20mпњљћХпњљпњљпњљпњљћГeпњљ[пњљuпњљпњљпњљпњљпњљAпњљпњљпњљпњљпњљ…ВпњљпњљпњљпњљпњљпњљQпњљпњљпњљ∆ВпњљпњљƒВпњљпњљ№ВпњљпњљBпњљQпњљWпњљпњљпњљћГAпњљпњљпњљSпњљпњљпњљYпњљпњљпњљЌКiпњљqпњљCпњљћГпњљпњљfпњљпњљпњљпњљпњљgпњљpпњљпњљпњљƒВпњљпњљпњљAпњљVпњљ~пњљпњљпњљпњљпњљ[пњљVпњљпњљпњљпњљпњљћГпњљпњљfпњљпњљпњљ…Кпњљ√ВпњљпњљпњљMatlabпњљпњљпњљgпњљpпњљпњљпњљƒГGпњљNпњљXпњљ|пњљ[пњљgпњљпњљпњљкВљtxtпњљtпњљ@пњљCпњљпњљпњљOпњљпњљпњљ[пњљvпњљ÷В∆ГvпњљпњљпњљOпњљпњљпњљпњљпњљпњљпњљпњљпњљƒВпњљпњљ№ВпњљпњљBпњљпњљпњљпњљ…ГCпњљпњљпњљ^пњљ[пњљtпњљFпњљ[пњљXпњљпњљ“ПWпњљпњљпњљпњљUC-win/RoadпњљћК÷ШAпњљfпњљ[пњљ^пњљћГCпњљпњљпњљ|пњљ[пњљgпњљпњљпњљsпњљпњљпњљ№ВпњљпњљB
This work is a plugin based on the UC-win/Road 8.1.2 and secondary development
of UC-win/Road SDK 8.1.2, which achieves the pedestrian evacuation and
Data Interface of the UC-win/Road,the demo is simulated in the UC-win/Road.
The room used in the simulation scenarios is drawn by 3Dmax, whose length
is 30 meter, width is 20 meters wide, and the tables in the room also can
be seen as other real-life obstacles in the real-life. The algorithm of
the crowd evacuation uses the lattice gas model, then we program to exported
txt-file group using the Matlab based on the model of the simulation and
edit interfaces to import the related data in the UC-win/Road.
|
PDFпњљ|пњљXпњљ^пњљ[(416KB) |
|
|
PPT(1,664KB) |
|
пњљTпњљпњљпњљvпњљпњљпњљжСЬ |
 |
 |
 |
|
|
 |
|
пњљmпњљ~пњљlпњљ[пњљgпњљпњљ |
|
пњљ@пњљпњљiпњљ^пњљCпњљgпњљпњљпњљFпњљ@My Traffic Simulation Plugin
пњљ@пњљ`пњљ[пњљпњљпњљпњљпњљ@пњљ@пњљFпњљ@пњљпњљCпњљCпњљпњљпњљпњљwпњљ@Sonicboom |
|
|
|
UC-win/Roadпњљ≈Мпњљ ГVпњљ~пњљпњљпњљпњљпњљ[пњљVпњљпњљпњљпњљпњљпњљпњљsпњљпњљпњљ∆БAпњљпњљ Ч ВЌР√УIпњљ»Г{пњљпњљпњљпњљпњљ[пњљпњљпњљ∆В»Впњљ№ВпњљпњљпњљпњљAпњљпњљпњљџВЌОпњљпњљ‘В…ВпњљпњљпњљƒХѕЙпњљпњљпњљпњљ№ВпњљпњљBпњљпњљпњљпњљЌБuпњљќМпњљпњљvпњљпњљпњљпњљпњљпњљпњљзВЈпњљ¬Ф\пњљпњљпњљпњљпњљпњљпњљпњљ№ВпњљпњљBпњљиУЃпњљ≈РпњљпњљпњљѕНXпњљпњљпњљпњљJпњљЌВпњљпњљ»ВпњљпњљЏУIпњљ≈БAпњљvпњљпњљпњљOпњљCпњљпњљпњљпњљпњљмРђпњљпњљпњљ№ВпњљпњљпњљпњљB
When using UC-win/Road to simulation traffic, traffic volume is a static
number in the software, but varies time by time in real life. This could
cause deviation. Change the numbers all by hand is a lot of work, which
makes us want to design a plugin.
|
PDFпњљ|пњљXпњљ^пњљ[(627KB) |
|
|
PPT(196KB) |
|
пњљTпњљпњљпњљvпњљпњљпњљжСЬ |
 |
 |
 |
|
|
|
|
пњљmпњљ~пњљlпњљ[пњљgпњљпњљ |
|
пњљ@пњљпњљiпњљ^пњљCпњљgпњљпњљпњљFпњљ@run constant height from the ground
пњљ@пњљ`пњљ[пњљпњљпњљпњљпњљ@пњљ@пњљFпњљ@пњљпњљпњљпњљwпњљ@city environmental design |
|
|
|
пњљпњљпњљпњљпњљ≈ВЌБAпњљnпњљ ВпњљпњљпњљћИпњљпњљћНпњљпњљпњљпњљ≈ИЏУпњљпњљпњљпњљ№ВпњљпњљBпњљпњљпњљsпњљ“В∆Опњљпњљ]пњљ‘ВЌФпњљsпњљпњљпњљ[пњљgпњљ…ВпњљпњљпњљпњљƒРiпњљЁВ№ВпњљпњљB
In the sidewalk,I run constant height from the ground. A walker and a bicycle
use a flight route.
|
PDFпњљ|пњљXпњљ^пњљ[(510KB) |
|
|
PPT(5,419KB) |
|
пњљTпњљпњљпњљvпњљпњљпњљжСЬ |
 |
 |
 |
|
|
|
пњљRпњљпњљпњљѕИпњљпњљпњљпњљuпњљ] |
|
|
пњљпњљCPWCпњљRпњљпњљпњљѕИпњљпњљпњљпњљ@пњљпњљпњљcпњљmпњљOпњљпњљпњљ…Впњљпњљuпњљ]
пњљпњљ1пњљпњљ пњљwпњљпњљпњљNпњљпњљпњљEпњљhпњљvпњљпњљпњљOпњљпњљпњљ~пњљпњљпњљOпњљJпњљbпњљvпњљЌБAпњљGпњљпњљпњљWпњљjпњљAпњљпњљпњљпњљпњљOпњљAпњљrпњљWпњљlпњљXпњљAпњљQпњљ[пњљпњљпњљпњљпњљћХпњљпњљпњљпњљќПџВ…БAVRпњљ\пњљtпњљgпњљEпњљFпњљAпњљћРVпњљпњљпњљ»Й¬Ф\пњљпњљпњљпњљ«ЛпњљпњљпњљпњљйВљпњљяВ…Опњљпњљ{пњљпњљпњљпњљпњљBпњљJпњљпњљпњљLпњљbпњљgпњљiSDKпњљjпњљпњљpпњљпњљпњљпњљпњљпњљпњљпњљћКJпњљпњљпњљпњљ ВпњљпњљƒБAпњљRпњљпњљпњљeпњљпњљпњљcпњљћРVпњљпњљпњљ»Й¬Ф\пњљпњљпњљпњљпњљпњљпњљcпњљ_пњљ≈ВпњљпњљпњљќВ∆Кпњљпњљ“ВпњљпњљƒВпњљпњљпњљB6пњљпњљпњљпњљпњљGпњљпњљпњљgпњљпњљпњљ[пњљпњљпњљЌВпњљпњљпњљ10пњљпњљ10пњљпњљпњљ№В≈В…БAпњљv6пњљпњљiпњљпњљпњљпњљoпњљпњљпњљкВљпњљBпњљпњљпњљ В…ВЁВпњљ∆БA3пњљпњљiпњљпњљпњљпњљпњљпњљпњљпњљпњљпњљAпњљcпњљпњљпњљ3пњљпњљiпњљпњљпњљпњљпњљ{пњљпњљпњљпњљ≈ВпњљпњљпњљпњљпњљпњљBпњљSпњљƒВпњљпњљAUC-win/RoadпњљпњљSDKпњљ≈КJпњљпњљпњљпњљпњљsпњљпњљпњљпњљпњљAпњљGпњљпњљпњљWпњљjпњљAпњљпњљпњљпњљпњљOпњљnпњљћГ\пњљtпњљgпњљEпњљFпњљAпњљ≈ВпњљпњљпњљпњљпњљпњљBпњљпњљoпњљпњљпњљкВљпњљAпњљVпњљXпњљeпњљпњљпњљћКTпњљvпњљпњљHпњљvпњљ_пњљпњљпњљпњљпњљпњљпњљпњљпњљpпњљпњљпњљ[пњљ|пњљCпњљпњљпњљgпњљAпњљVпњљXпњљeпњљпњљпњљћУпњљпњљпњљпњљпњљпњљпњљпњљпњљпњљйГАпњљ[пњљrпњљ[пњљAпњљ\пњљ[пњљXпњљRпњљ[пњљhпњљпњљRпњљпњљпњљпњљпњљпњљпњљ∆ВпњљпњљƒБA10пњљпњљпњљпњљпњљпњљ1пњљпњљпњљRпњљпњљпњљпњљпњљпњљпњљ{пњљпњљпњљAпњљeпњљRпњљпњљпњљпњљпњљћОпњљпњљпњљпњљ_пњљпњљ10пњљ_пњљ∆ВпњљпњљƒБAпњљeпњљпњљiпњљ÷ВћУпњљпњљ[пњљпњљпњљпњљпњљ{пњљпњљпњљпњљпњљBпњљпњљпњљ БA6пњљпњљiпњљпњљпњљ„ВƒВпњљ1пњљпњљпњљRпњљпњљпњљпњљ ЙяВпњљпњљA11пњљпњљ21пњљпњљпњљћН≈ПIпњљRпњљпњљпњљ…РiпњљёВпњљпњљ∆В∆В»ВпњљпњљпњљпњљBпњљпњљпњљпњљпњљƒБA11пњљпњљ21пњљпњљпњљ…ВЌКeпњљ`пњљ[пњљпњљпњљпњљпњљпњљпњљпњљпњљEпњљЏНпњљпњљ…ПWпњљпњљпњљAпњљ≈ПIпњљvпњљпњљпњљ[пњљпњљпњљeпњљ[пњљVпњљпњљпњљпњљпњљBпњљ≈ПIпњљRпњљпњљпњљћМпњљпњљ БAпњљOпњљпњљпњљпњљпњљvпњљпњљпњљ∆В»ВпњљпњљпњљKU-ITSпњљiпњљпњљпњљsпњљпњљwпњљjпњљћНпњљiпњљЌБANIRSпњљiпњљяР‘КOпњљпњљпњљпњљпњљ]пњљпњљпњљпњљпњљпњљпњљ‘МvпњљпњљпњљпњљпњљuпњљjпњљпњљпњљuпњљпњљUC-Win/Roadпњљ∆ВћШAпњљgпњљпњљпњљsпњљпњљпњљvпњљпњљпњљOпњљCпњљпњљпњљпњљпњљ≈ВпњљпњљпњљAпњљпњљпњљпњљпњљxпњљћНпњљпњљпњљпњљAпњљпњљпњљpпњљIпњљ»Г\пњљtпњљgпњљEпњљFпњљAпњљ≈ВпњљпњљпњљпњљпњљпњљBпњљRпњљпњљпњљћМпњљпњљ БAпњљпњљпњљпњљпњљvпњљ≈ВћГOпњљпњљпњљпњљпњљvпњљпњљпњљпњљпњљпњљ∆В»ВпњљпњљпњљпњљB
пњљпњљпњљпњљЌСпњљ1пњљпњљЏВ≈ВпњљпњљпњљAпњљпњљпњљпњљ“В∆ВпњљпњљƒВЌБAпњљOпњљбВ™пњљпњљпњљпњљпњљпњљпњљ≈ВћОQпњљпњљпњљ∆В»ВйВљпњљяБAпњљпњљпњљеО©пњљћВпњљпњљSпњљOпњљпњљпњљкВљпњљпњљAпњљпњљпњљпњљпњљпњљпњљпњљяВпњљкВљпњљ∆ВпњљпњљƒВпњљпњљuпњљ«Впњљ»Гeпњљ[пњљ}пњљ…Впњљпњљ„Впњљпњљпњљпњљvпњљuпњљ«Впњљпњљ№В≈КJпњљпњљпњљпњљпњљ„Впњљпњљпњљпњљvпњљ»В«ЦпњљпњљпњљкВљпњљ ВпњљпњљпњљпњљXпњљпњљпњљпњљпњљпњљпњљжВ§пњљ…ОvпњљпњљпњљпњљпњљBпњљпњљпњљsпњљѕИпњљпњљпС§пњљ∆ВпњљпњљƒБAпњљпњљпњљпњљпњљAпњљпњљпњљпњљпњљпњљ@пњљпњљXпњљPпњљWпњљпњљпњљ[пњљпњљпњљ»В«ОпњљпњљsпњљпњљпњљпњљћТпњљпњљ≈ПпњљпњљпњљпњљпњљiпњљяВƒВпњљпњљпњљпњљпњљпњљ∆ВЌФџВяВ»ВпњљпњљBпњљпњљпњљћИ”Цпњљпњљ≈БAпњљпњљпњљпњљSпњљпњљпњљпњљпњљпњљпњљƒЙпњљпњљеВ≥пњљкВљпњљwпњљпњљпњљпњљпњљNпњљ…Мпњљпњљпњљ\пњљпњљпњљгВ∞пњљпњљпњљпњљпњљBпњљпњљпњљћГпњљпњљ[пњљпњљпњљhпњљJпњљbпњљvпњљ÷ВћОQпњљпњљпњљпњљ ВпњљпњљƒБAпњљпњљпњљЌБAпњљVпњљXпњљeпњљпњљпњљJпњљпњљпњљЌБAпњљfпњљUпњљCпњљпњљпњљЌБAпњљvпњљпњљпњљ[пњљпњљпњљeпњљ[пњљVпњљпњљпњљпњљпњљЌУпњљпњљћМпњљпњљпњљ…Ппњљпњљпњљпњљ≈Впњљпњљпњљ^пњљ≈ВпњљпњљпњљќНKпњљпњљпњљ≈ВпњљпњљпњљBпњљпњљпњљпњљAVR-Cloudпњљ…К÷ВпњљпњљпњљVпњљXпњљeпњљпњљпњљпњљƒВпњљпњљпњљпњљпњљпњљ_пњљпњљпњљпњљпњљXпњљcпњљOпњљ≈ВпњљпњљпњљпњљпњљпњљBпњљпњљпњљNпњљxпњљ…Кпњљпњљ“ВпњљпњљпњљпњљпњљпњљB
пњљпњљGeneral comments by Associate Prof. Tomohiro Fukuda, Chief of executive
committee of CPWC
The 1st Cloud Programming World Cup was held in quest of new possibilities that a VR software can offer in the field of engineering, business, gaming, etc. Through the development of a new tool using UC-win/Road Software Development Kit (hereafter, SDK) and VR-Cloud(R) SDK, we could even have a debate on some of the new possibilities the newly developed contents have to offer, and thatпњљfs the kind of expectation that we have. The application to the competition started from June and 6 works were submitted by the deadline, which was October 10th. Of the 6 works, 3 works were from China and the other 3 works from Japan. All 6 works were engineering software developed using UC-win/Road SDK. The preliminary evaluation meeting took place at the end of October when the judges allocated however number of points they wished from the 10 points that were given to each of them. The judges used a Power Point Slide that explains the systemпњљfs overview and feature that was invented, a movie that shows the system in action, and the source code, all of which came with the submission, as materials they can rely on to evaluate each work. All 6 works were chosen to be considered for final evaluation on November 21st, and on this day each of the 6 teams presented on their work in front of the stage at the venue in Meguro, Tokyo. The Grand Prix went to team KU-ITS (Kyoto University) who developed a plug-in that provide seamless linkage of NIRS (Near Infrared Spectroscopy) system with UC-win/Road, very practical software considered as having integrity. All the judges gave their thumbs up for this development.
As this was our first year to hold such competition, it seemed that the students were quite hesitant to enter the competition itself and even when they did decide to take part it took them a long time to come up with a theme and to define the extent of their development. To be honest, the members of the Cloud Programming World Cup Executive Committee themselves used the trial-and-error approach to fix the application procedure and schedule for the competition. In that regard, we would like to thank all students who were brave enough to enter the competition to put their programming skills to the test. We hope that the contestants and creative works that we saw in the competition would help us improve our capability to plan, develop, design, and present a number of new systems in the near future. On the other hand, the fact that none of the submissions proposed a system that relates to VR-Cloud(R) left something to be desired. We expect to see this kind of system in next yearпњљfs competition.
|
|
|
|
|







>> пњљпњљпњљiпњљпњљпњљпњљпњљJпњљ^пњљпњљпњљO

>> пњљvпњљпњљпњљ~пњљAпњљпњљпњљпњљпњљпњљTпњљ[пњљrпњљX
>> пњљtпњљ@пњљCпњљiпњљпњљпњљVпњљпњљпњљпњљпњљTпњљ|пњљ[пњљg
| пњљ≈ЛяГпњљпњљпњљпњљ[пњљXпњљпњљпњљпњљпњљпњљпњљi |
|
|
|